Daily Trend [11-09]
【1】RoboGen: Towards Unleashing Infinite Data for Automated Robot Learning via Generative Simulation
【URL】http://arxiv.org/abs/2311.01455
【Time】2023-11-02
一、研究领域
generative robotic agent
二、研究动机
robotic research一个很有挑战的task是:赋予机器人多种技能,使它们能够在各种non-factory环境中运行,并为人类执行各种各样的任务。但是,由于现实世界数据收集的昂贵且费力的性质,所以其中许多技能都是在具有适当领域随机化的模拟中进行训练,然后部署到现实世界。文章利用现有的基础模型,提出了一种自动化的范式驱动机器人的skill learning。
三、方法与技术
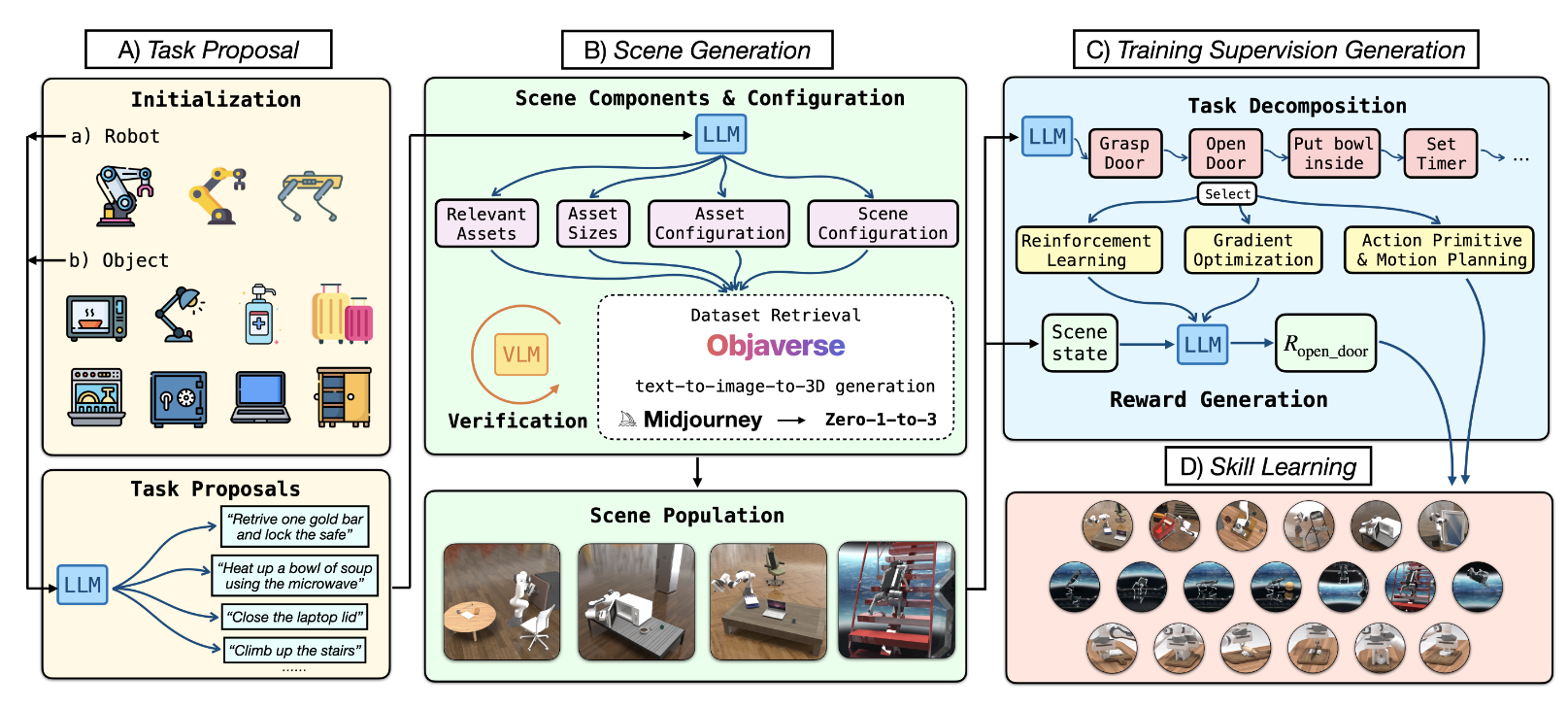
RoboGen包含四个阶段:
(1)task proposal:使用特定的robot type和从池中随机采样的object来初始化系统,使系统能够生成 meaningful, diverse, and high-level 的 tasks for robots to learn (形式是query texts)。
(2)scene generation:先用GPT增强query(不在database中的物体描述等);再从objaverse中检索object或者用text-to-image-to-3D模型生成assets(形式是3D mesh);然后使用这些assets和特定的configuration来填充相应的场景,从而生成任务对应的场景。
(3)training supervision generation:RoboGen 中集成了三种不同类型的学习算法:强化学习、进化策略、基于梯度的轨迹优化和具有运动规划的动作原语,不同的算法适用于不同类型的任务。用GPT-4编写奖励函数,以及决策使用哪种算法解决哪种任务。
(4)skill learning with generated information:一旦我们获得了所提出的任务所需的所有信息,包括场景组件和配置、任务分解以及分解的子任务的训练监督,就能够为机器人构建模拟场景,以学习完成任务所需的技能任务。
四、总结
非常复杂的pipeline居然很神秘地work了,背后应该涉及非常多的工程性问题。